Nhóm nghiên cứu Cao Thanh Bộ, Phạm Trường Hưng, Lê Hoài Nam, Nguyễn Danh Ngọc, Trường đại học bách khoa Đà Nẵng đã so sánh hai bộ điều khiển (bộ điều khiển PID và bộ điều khiển LQG), đánh giá để lựa chọn áp dụng cho nguyên mẫu robot cân bằng trên quả cầu được thiết kế và chế tạo tại khoa cơ khí, Trường đại học bách khoa. Chất lượng của các bộ điều khiển được đánh giá thông qua mô phỏng với các điều kiện hoạt động khác nhau. Các kết quả cho thấy bộ điều khiển LQG có chất lượng tốt hơn (thời gian đáp ứng, thời gian xác lập nhanh hơn) bộ điều khiển PID.
Robot cân bằng trên quả cầu (Ball Balancing Robot – BBR), còn gọi là Ballbot theo tên nguyên mẫu đầu tiên được nghiên cứu chế tạo. Đây là loại robot di động gồm một quả cầu (bóng) và một robot cân bằng trên đầu quả cầu đó bằng cách lái các bánh của nó theo hướng thích hợp để tránh ngã đổ. Trái ngược với các robot di động truyền thống vốn dựa vào trọng tâm thấp và chiều dài cơ sở (wheel-base) lớn để giữ robot đứng thẳng, robot cân bằng trên quả cầu vốn dĩ không ổn định nên phải luôn được giữ cân bằng một cách chủ động (tức là phải luôn điều khiển các bánh).
Ngoài ra, các robot di động bằng bánh truyền thống thường có hai bánh lái độc lập (ví dụ Segway) có thể xoay quanh điểm bất kỳ, nhưng không thể đổi hướng di chuyển ngay lập tức. Hạn chế này được khắc phục bởi robot cân bằng trên quả cầu, chúng có thể thực hiện chuyển động đa hướng nhanh mà không cần thay đổi hướng của các bánh xe (không cần xoay thân). Ưu điểm này giúp robot tránh va chạm khi làm việc trong các không gian chật hẹp.
Nhiều nguyên mẫu BBR đã được thiết kế và chế tạo. Nguyên mẫu đầu tiên được phát triển vào năm 2006 tại Đại học (ĐH) Carnegie Mellon (CMU) có kích thước tương đương người thật với mục đích tương tác với con người. Robot này có một cơ chế lái khá phức tạp gồm 4 con lăn (roller) chủ động và một hệ thống lái nhằm thực hiện chuyển động xoay theo trục dọc. Năm 2008, ĐH Tohoku Gakuin (TGU) đã phát triển một nguyên mẫu BBR khác nhỏ hơn so với nguyên mẫu của CMU, có thể thực hiện các chuyển động tương tự (bao gồm chuyển động xoay quanh trục dọc) chỉ với 3 động cơ nối với 3 bánh xe đa hướng (omni-wheel) để lái quả bóng. ĐH Adelaide xây dựng một BBR có hai bánh xe để lái bóng sử dụng bộ kit LEGO Mindstorms NXT và các khối LEGO vào năm 2009. ETH Zurich vào năm 2010 cũng phát triển nguyên mẫu BBR tương tự của TGU. Nguyên mẫu Rezero của ETH Zurich có độ bền vững động (dynamic robustness) cao, có thể đạt được tốc độ đến 2 m/s và góc nghiêng 200. Gần đây, có thêm nhiều nguyên mẫu BBR được thiết kế và chế tạo.
Để BBR có thể thực hiện các chuyển động phức tạp ở tốc độ cao, nhiều chiến lược điều khiển khác nhau được đề xuất. Tuy nhiên, theo hiểu biết của nhóm tác giả thì chưa nhiều nghiên cứu đề cập đến việc ứng dụng bộ điều khiển Gaussian toàn phương tuyến tính (Linear Quadratic Gaussian - LQG) vào điều khiển BBR. Bộ điều khiển LQG là một trường hợp cụ thể của LQR, trong đó bộ lọc Kalman được sử dụng để ước lượng trạng thái của hệ thống.
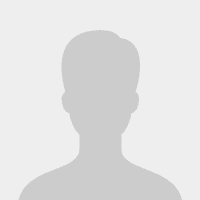
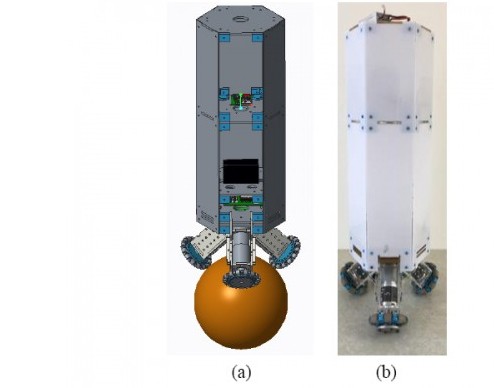
Lấy cảm hứng từ Rezero của ETH Zurich, nguyên mẫu BBR được thiết kế và chế tạo tại khoa cơ khí, Trường đại học bách khoa Đà Nẵng gồm ba bánh xe đa hướng được truyền động bởi ba động cơ DC được bố trí lệch nhau 1200. Điểm đặc biệt là phần thân nguyên mẫu có hình lăng trụ lục giác đều, phù hợp cho việc chế tạo lớp vỏ bảo vệ. Nguyên mẫu BBR bao gồm 3 phần chính: phần thân, hệ thống động lực và quả cầu.
Thân robot bao gồm 4 tấm ngang hình lục giác và 6 tấm phẳng thẳng đứng được làm bằng vật liệu ABS và plexiglass để giảm khối lượng của BBR. Các tấm này được lắp ráp với nhau bởi các chi tiết nối được chế tạo bằng công nghệ in 3D. Hệ thống động lực được gắn chặt vào tấm đáy. Tấm thứ hai đặt nguồn cung cấp cho robot. Khối đo lường quán tính (IMU - Inertia Measurement Unit) và mạch điều khiển trung tâm được đặt trên tấm thứ ba.
Dữ liệu trạng thái của robot được thu thập bởi khối IMU bao gồm một cảm biến MPU6050 xác định vận tốc góc bằng gia tốc kế và con quay hồi chuyển (gyroscope) và một cảm biến HMC5883L đo lường góc thông qua hướng và độ lớn của từ trường Trái đất. Dữ liệu từ hai cảm biến được tổng hợp bởi mạch Arduino Nano trước khi gửi đến khối điều khiển trung tâm.
Khối điều khiển trung tâm là một mạch Arduino Mega2560, nhận dữ liệu trạng thái từ IMU và tính toán, truyền đến khối điều khiển động cơ, các giá trị đặt cho mỗi động cơ. Mạch này cũng đảm bảo các kết nối không dây để điều khiển và thu thập dữ liệu BBR từ xa.
Hệ thống động lực robot bao gồm ba động cơ DC dẫn động ba bánh xe đa hướng và các mạch driver tương ứng. Vị trí trục và dòng điện của các động cơ được đo bằngencoder và cảm biến dòng. Các thông tin này được khối điều khiển động cơ sử dụng để điều chỉnh tốc độ và momen xoắn của mỗi động cơ theo phương pháp điều chế độ rộng xung (PWM - Pulse Width Modulation).
Kết quả nghiên cứu, hai kỹ thuật điều khiển tuyến tính (PID và LQG) được so sánh và đánh giá thông qua mô phỏng cho vấn đề điều khiển robot cân bằng trên quả cầu. Đầu tiên, hệ thống robot được điều khiển bởi năm bộ điều khiển PID, trong đó mỗi bộ PID điều khiển một thành phần của véc tơ tọa độ tối thiểu q của robot. Sau đó, một bộ điều khiển LQG tích hợp một bộ lọc Kalman được xây dựng cho robot này. Kết quả mô phỏng cho thấy bộ điều khiển LQG cho đáp ứng nhanh và chất lượng tốt hơn so với PID. Do đó, bộ điều khiển LQG sẽ được xem xét áp dụng trên nguyên mẫu thực tế.
Theo Khoa học Phổ thông
http://www.khoahocphothong.com.vn/robot-co-the-chuyen-dong-da-huong-nhanh-chong-50901.html





























