Các robot cứu hộ là những công cụ vô cùng hữu ích trong tương lai. Chúng có thể đi vào những khu vực cực kỳ nguy hiểm đối với con người. Nhưng nếu bạn đã từng nhìn thấy robot cứu hộ trên thực tế, thì bạn phải đồng ý với tôi rằng việc phối hợp giữa người điều khiển và robot cứu hộ chưa bao giờ dễ dàng. Đa phần robot cứu hộ ngày nay thiếu đi tính linh hoạt và sự phối hợp cần thiết.
Để khắc phục điều này, một nhóm các nhà khoa học từ Nhật Bản đã tìm kiếm một phương pháp điều khiển robot mới, cho phép con người vận hành robot giống như một con rối khổng lồ.
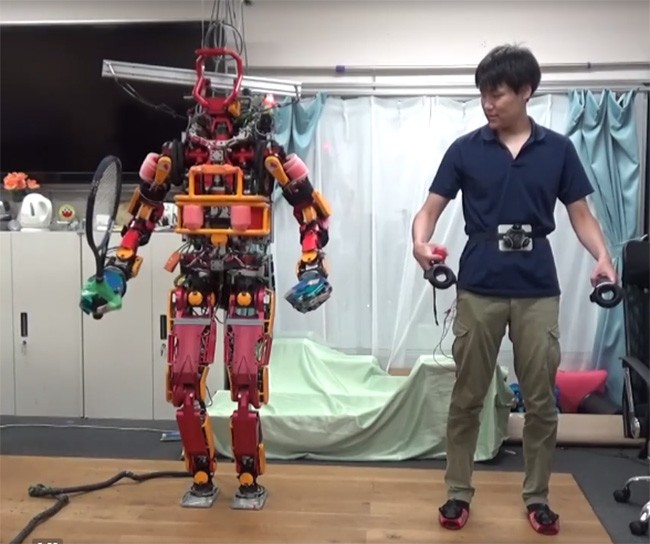
Các nhà khoa học thuộc trường Đại học Tokyo cho biết phương pháp của họ tiên tiến hơn những cách điều khiển robot khác. Các hệ thống trước đây sử dụng robot nhỏ hơn hoặc chỉ kiểm soát nửa trên của robot, trong khi các nhà khoa học của Đại học Tokyo có thể điều khiển hoàn toàn một con robot to lớn như người trưởng thành thông qua các bộ điều khiển của hệ thống kính thực tế ảo HTC Vive.
Các cảm biến của Vive được sử dụng để theo dõi bộ điều khiển của nó trong không gian 3D bằng tia hồng ngoại. Các nhà nghiên cứu đã buộc bộ điều khiển vào chân và bàn tay của mình, sau đó dùng phần mềm mô phỏng các chuyển động của họ và gửi chúng dưới dạng các lệnh cho robot. Tuy nhiên, phần mềm trung gian này đảm bảo bất kỳ chuyển động nào được gửi cho robot cũng sẽ được tinh chỉnh để phù hợp với khả năng của nó. "Chẳng hạn, bước đi với tốc độ đi bộ được cho phép, nhưng chạy và nhảy bị cấm", nhà nghiên cứu Ishiguro Yasushiro cho biết. Ông Yasushiro thừa nhận rằng hệ thống vẫn còn "nhiều điểm yếu", nhưng khẳng định hệ thống này linh hoạt và khả năng đáp ứng với mệnh lệnh của nó rất tốt.
Robot mà các nhà khoa học sử dụng được phát triển cách đây vài năm bởi công ty JAXON. Trước đây, nó đã tham gia Cuộc thi Robotics Challenge của DARPA (Cơ quan các dự án phòng thủ tiên tiến Hoa Kỳ), nhằm thử nghiệm các chương trình trong tình huống thảm họa. Mặc dù những cỗ máy hình người hiện nay quá khó sử dụng trên thực tế, nhưng hy vọng rằng chúng sẽ tiện lợi hơn trong tương lai. Rốt cuộc, nếu robot phải di chuyển một không gian được xây dựng cho con người (có cửa ra vào, tay cầm..), hình dáng con người của robot sẽ rất có ích.
Yasushiro nói rằng ông và các đồng nghiệp chỉ thực sự làm chủ được việc điều khiển robot đi bộ chậm, và họ muốn robot thực hiện được nhiều động tác hơn, chẳng hạn như đi bộ lên xuống cầu thang, nhảy, và thậm chí chạy. Kính thực tế ảo có thể giúp nhà nghiên cứu thấy những gì mà robot nhìn thấy, và tạo ra các phản hồi phù hợp giúp họ cảm nhận được cảm giác của robot. Ông Yasushiro cho biết: "Mục đích cuối cùng là chúng tôi mong muốn tạo ra được một robot có thể thực hiện được tất cả động tác của con người”.






























