Đây là tác phẩm của Phòng thí nghiệm Trí tuệ nhân tạo tại MIT. Các nhà nghiên cứu ở đây đã thiết kế một hệ thống trí tuệ nhân tạo chưa từng có trong lịch sử. Được biết, ý tưởng này được lấy cảm hứng từ nghệ thuật xếp giấy origami của Nhật.
Bàn tay này được thực hiện bằng một loại cao su mềm, bản thân gồm hai lớp được xếp thành nhiều nếp gấp rất đơn giản để có thể căng phồng lên khi bơm không khí vào hoặc xẹp xuống khi không khí được hút ra, và có hình dáng thật sự như một chiếc ly úp ngược mà phần đáy ở trên được nối cố định vào một cánh tay vận hành rất mềm mại và linh hoạt.
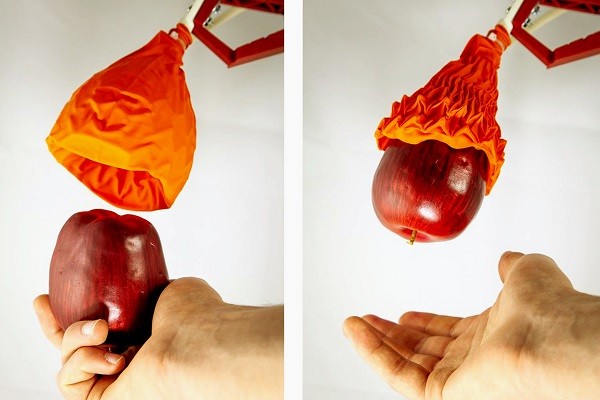
Phương cách cầm nắm đồ vật của bàn tay này mới thực sự ấn tượng. Khi phần miệng rộng của “bàn tay” đặt lên đồ vật, thậm chí chỉ một phần nhỏ của đồ vật.
Đầu tiên là không khí được robot bơm vào để bàn tay căng dài phủ lên “đối tượng” rồi ngay sau đó robot sẽ hút hết phần không khí bên trong theo kiểu hút chân không nên bàn tay lập tức “xẹp” lại và siết chặt lấy đồ vật.
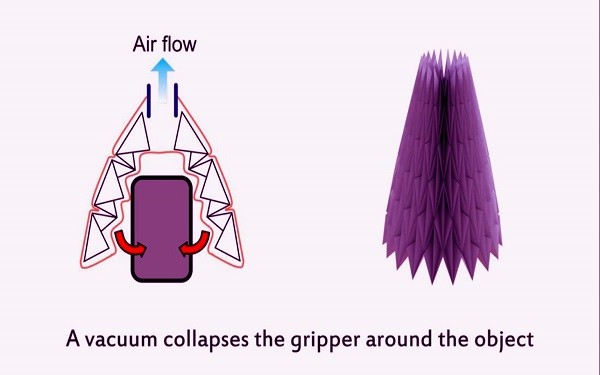
Mặt cắt và cơ chế cầm nắm của “bàn tay hoa tulip”.
Khi đem lại cho chủ nhân, không khí lại được bơm vào, bàn tay căng rộng ra và đồ vật được đặt lại ngay ngắn tại vị trí ấn định. Nói cách khác là robot này áp dụng nguyên tắc giải phóng khỏi khái niệm dùng ngón kẹp theo kiểu bàn tay con người.
Được các nhà thiết kế đặt tên là Robot Origami, robot này đặc biệt phù hợp để cầm nắm các vật thể mỏng manh mà áp lực kẹp của ngón tay cơ học có thể làm hỏng hoặc bể vỡ như trái cây, rau củ, các sản phẩm thủy tinh, túi giấy hoặc hộp carton đựng bột hoặc đường…
Sau nhiều thử nghiệm khác nhau, các nhà nghiên cứu đã tuyên bố rằng robot có khả năng nâng tới 100 lần trọng lượng của nó và nắm các vật phẩm có kích thước bằng 70% đường kính của miệng “hoa tulip”.
Cho tới nay, với kiểu dáng của bàn tay này, robot cầm nắm rất tốt với các vật thể hình trụ và hình cầu như chai lọ, trái cây, bông cải, bóng tròn...
Với thành quả này, nhóm nghiên cứu dự định sẽ mở rộng việc thử nghiệm cho robot bằng tầm nhìn máy tính. Robot sẽ quay phim hoặc chụp ảnh để phân tích hình dạng của đối tượng và tự xác định cách tốt nhất để cầm nắm.
Theo Khám Phá
http://khampha.vn/tin-quoc-te/robot-co-ban-tay-hinh-hoa-tulip-c5a710893.html

































