Robot phục vụ thường là robot di động, được thiết kế để hỗ trợ con người trong các trung tâm thương mại, sân bay, cơ sở chăm sóc sức khỏe, môi trường gia đình và nhiều môi trường phức tạp khác.
Ngoài những công việc thông thường, những robot này có thể giúp người dùng tìm đường trong một môi trường không xác định, như hướng dẫn khách đến một vị trí cụ thể hoặc cung cấp những thông tin cần thiết.
Những khả năng công việc của robot phục vụ được hoàn thiện đáng kể trong thập kỷ qua, nhưng các robot phục vụ, được triển khai trong môi trường hoạt động thực tế cho đến nay vẫn chưa có khả năng theo dõi hoặc hướng dẫn con người hiệu quả trong không gian đông đúc. Thực tế cho thấy, đào tạo huấn luyện robot theo dõi một người dùng cụ thể khi di chuyển điều hướng trong một môi trường linh hoạt, năng động, đặc trưng bởi nhiều "chướng ngại vật" di chuyển ngẫu nhiên không phải là một nhiệm vụ đơn giản.
Robot Techi Medic thực hiện việc giao thuốc đến các vị trí cần thiết trong bệnh viện đông người. Video Techmetics - Techi. |
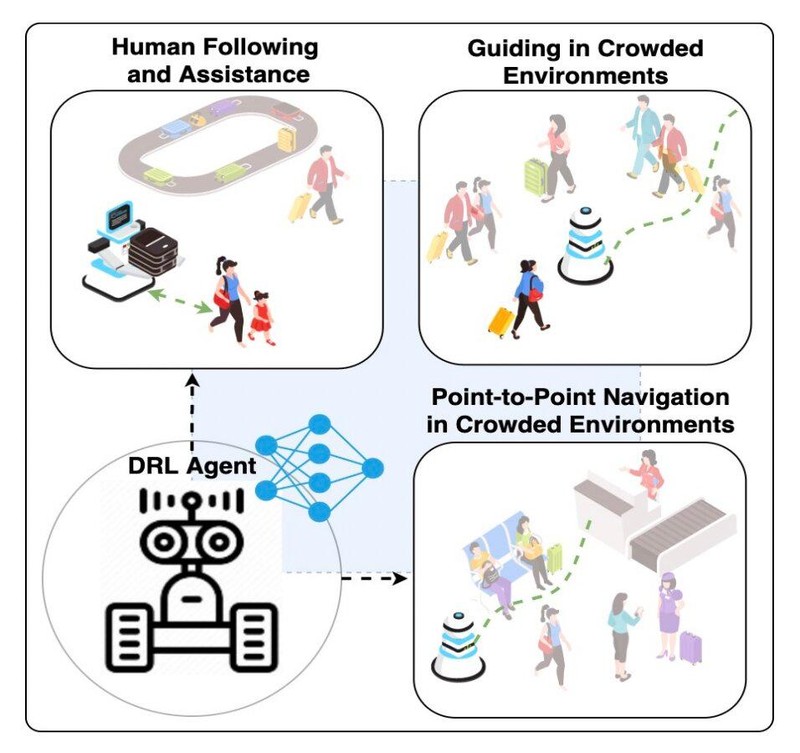
Các nhà khoa học tại Viện Công nghệ Berlin, Đức đã giới thiệu một mô hình robot mới, phát triển trên cơ sở Học sâu tăng cường, có thể cho phép robot di động dẫn một người khách cụ thể đến vị trí mong muốn hoặc di chuyển dõi theo người dùng khi mang đồ đạc của khách, tất cả đều trong môi trường đông người và các chướng ngại vật.
Mô hình tiên tiến, được giới thiệu chi tiết trong một bài báo, xuất bản trên Tạp chí arXiv, có thể gia tăng khả năng của robot phục vụ trong trung tâm thương mại, sân bay và những địa điểm công cộng khác.
Trong bài báo khoa học, các tác giả Linh Kästner, Bassel Fatloun, Zhengcheng Shen, Daniel Gawrisch và Jens Lambrecht viết: “Nhiệm vụ hướng dẫn hoặc phục vụ, đi theo con người trong môi trường đông đúc, như sân bay hoặc ga tàu, mang theo trọng lượng hoặc hàng hóa hiện vẫn chưa được giải quyết. Trong những trường hợp sử dụng này, robot không chỉ được yêu cầu tương tác thông minh với con người mà còn phải điều hướng di chuyển an toàn giữa đám đông."
Khi đào tạo mô hình robot mới, nhóm nghiên cứu cũng đưa vào các thông tin ngữ nghĩa về những trạng thái và hành vi của người được phục vụ như nói chuyện, chạy, v.v. Dữ liệu này cho phép mô hình robot đưa ra quyết định về phương pháp hỗ trợ người dùng tốt nhất, di chuyển cùng với khách hàng với tốc độ tương đương, tránh không va chạm với người khác hoặc các chướng ngại vật xung quanh.
Các nhà khoa học trong bài báo viết: "Chúng tôi đề xuất một tác nhân phần mềm trên cơ sở Học sâu tăng cường cho các nhiệm vụ hướng dẫn con người và di chuyển dõi theo trong môi trường đông đúc. Chúng tôi đưa vào thông tin ngữ nghĩa để cung cấp cho tác nhân thông tin cấp cao như trạng thái xã hội của con người, mô hình an toàn và phân loại các nhóm hành vi”.
Để kiểm tra tính hiệu quả của mô hình, nhóm nghiên cứu thực hiện một loạt thử nghiệm, sử dụng Arena-rosnav, một môi trường mô phỏng hai chiều (2D) để đào tạo và đánh giá các mô hình Học sâu . Kết quả của các thử nghiệm này đầy hứa hẹn, vì tác nhân nhân tạo trong các kịch bản mô phỏng có thể hướng dẫn con người đến các địa điểm cụ thể và dõi theo khách hàng, điều chỉnh vận tốc mô hình phù hợp với người dùng và tránh những chướng ngại vật xung quanh.
Phương thức tiếp cận mới so với phương thức tiếp cận điểm chuẩn không thông tin ngữ nghĩa đã chứng minh được độ an toàn và tăng cường khả năng di chuyển điều hướng. Tác nhân có thể học cách tương thích hành vi của mô hình với con người, tăng cường đáng kể sự tương tác giữa người và người máy.
Mô hình Học sâu tăng cường hoạt động tốt trong trình mô phỏng, do đó cần phải xác thực hiệu suất bằng việc thử nghiệm sử dụng robot vật lý trong môi trường thế giới thực. Trong tương lai, công trình nghiên cứu mở đường cho khả năng chế tạo các robot phục vụ hiệu quả và gần gũi với con người cho các sân bay, nhà ga xe lửa, bệnh viện và các không gian công cộng đông người khác.

Tìm hiểu thực vật để "mở khóa" điều trị ung thư
“E-tattoos” - xăm hình để theo dõi huyết áp thường xuyên, liên tục và chính xác vượt trội